Door hun staart als een soort vijfde pootje te gebruiken en hun bovenlijf acrobatisch ver naar achteren te laten leunen, doet de harde botsing met een boom hen weinig.
De platstaartgekko (Hemidactylus platyurus) is een boombewoner en springt met gemak van de ene naar een andere boom. Ook als die andere boom enkele meters verderop staat; de gekko overbrugt die afstand door te zweven. Dat is op zichzelf al een knappe prestatie. Maar dan moet er ook nog heelhuids geland worden.
Hoge snelheid
En ook dat is echt niet eenvoudig, want al zwevend kunnen de gekko’s een snelheid van wel 6 meter per seconde, oftewel 21 kilometer per uur behalen. Wanneer je met je auto met zo’n snelheid tegen een boom rijdt, resulteert dat in een flinke deuk. Maar wanneer een gekko met die snelheid op een boomstam landt, loopt hij direct weg, alsof er niets gebeurd is. Hoe is dat mogelijk?
Onderzoek
Om een antwoord te krijgen op die vraag observeerden onderzoekers gekko’s die met behoorlijke snelheid van boom naar boom zweefden. En al snel viel hen iets op; gekko’s die hun staart kwijt waren geraakt, klapten hard op de boom en vielen er direct af. Gekko’s met staart crashten ook stevig, maar vielen niet, sterker nog: ze liepen daarna verder alsof er niets was gebeurd. Het suggereerde dat de staart een belangrijke rol speelde.
De gekko’s die nog over een staart beschikten, duwden deze zodra ze landden, tegen de stam aan en bogen hun bovenlijf gelijktijdig naar achteren. Daarbij lieten hun voorpootjes de stam los en bleven alleen de achterpootjes (en staart) in contact met de boom (zie afbeelding hieronder).
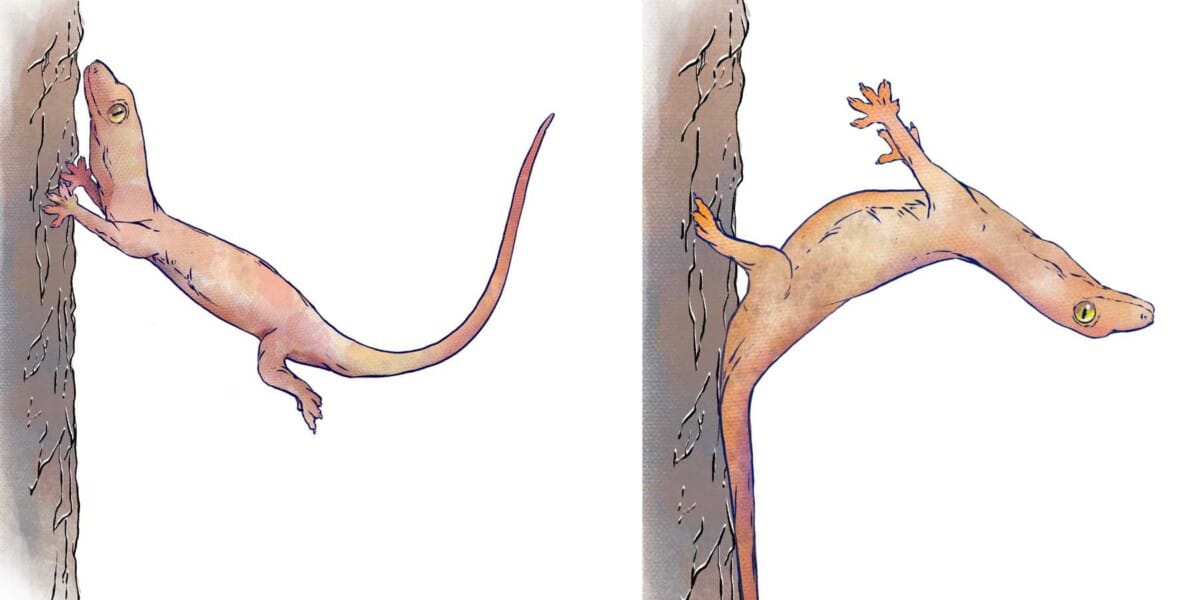
Het lijkt erop dat de gekko’s hun staart als een soort vijfde pootje gebruiken, zo stellen de onderzoekers. Door de staart hard tegen de stam te drukken, kunnen ze het zich permitteren dat de voorpootjes weer van de stam loskomen en hun bovenlijf acrobatisch ver naar achteren beweegt. En door – terwijl de staart tegen de stam wordt gedrukt – ver achterover te leunen, vindt er energiedissipatie plaats. Dieren die niet over een staart beschikten, kunnen niet de benodigde energiedissipatie realiseren en vallen naar beneden.
Robot
Experimenten met een robot-gekko onderschrijven dat. De wetenschappers ontwikkelden een robotje met een zacht bovenlijf, waar naar wens een staartje aan geklikt kon worden. Ze programmeerden de robot zo dat deze, op het moment dat zijn voorpootjes een oppervlak raakten, zijn staart en bovenlijf net zo bewoog als de echte gekko’s deden. Met behulp van sensoren werd vervolgens gemeten welke krachten de voor- en achterpootjes van de robot te verduren kregen. De experimenten wijzen uit dat de staart tijdens de crash inderdaad een cruciale rol speelt. Hoe langer de staart, hoe lager de krachten die de achterpootjes van het oppervlak los proberen trekken. En hoe lager die krachten, hoe gemakkelijker het voor de robot – en dus ook voor de gekko – is om aan de bast van de boom te blijven hangen. Zonder staart werden de krachten die de achterpootjes van het oppervlak los proberen te trekken, zo hoog dat de robot de grip kwijtraakte en naar beneden viel.

Het onderzoek geeft niet alleen meer inzicht in hoe gekko’s na hun crashlanding vrijwel onverstoord weer verder kunnen gaan. Het kan ook implicaties hebben voor de ontwikkeling van robots. “De natuur heeft veel onverwachte, elegante oplossingen voor technische problemen,” meent onderzoeker Robert Siddall. “En dit wordt prachtig geïllustreerd door de wijze waarop gekko’s hun staarten kunnen gebruiken om een frontale botsing succesvol om te zetten in een zachte landing. Landen na een vlucht is lastig en we hopen dat onze resultaten leiden tot nieuwe mobiliteitstechnieken voor robots.”



